Робот-жук
Предлагаемый набор NM7010 МАСТЕР КИТ позволит радиолюбителю собрать занимательного робота, который своим поведением и внешним видом чем-то напоминает жука: это настоящий робот, снабженный двумя инфракрасными фотоэлектрическими сенсорами, обнаруживающими препятствия; электромоторами с мостовыми схемами управления и светодиодной индикацией. Управляет роботом микроконтроллер AT90S2313 с необходимым для нормальной работы программным обеспечением.
Набор, безусловно, будет интересен и полезен для знакомства с основами робототехники и получения опыта сборки и настройки микропроцессорных устройств, а также начинающим программистам, для знакомства с основами программирования микроконтроллеров.
На плате предусмотрено место для установки модуля радиоуправления МК324, что позволяет при желании управлять роботом вручную по радиоканалу на частоте 433 МГц.
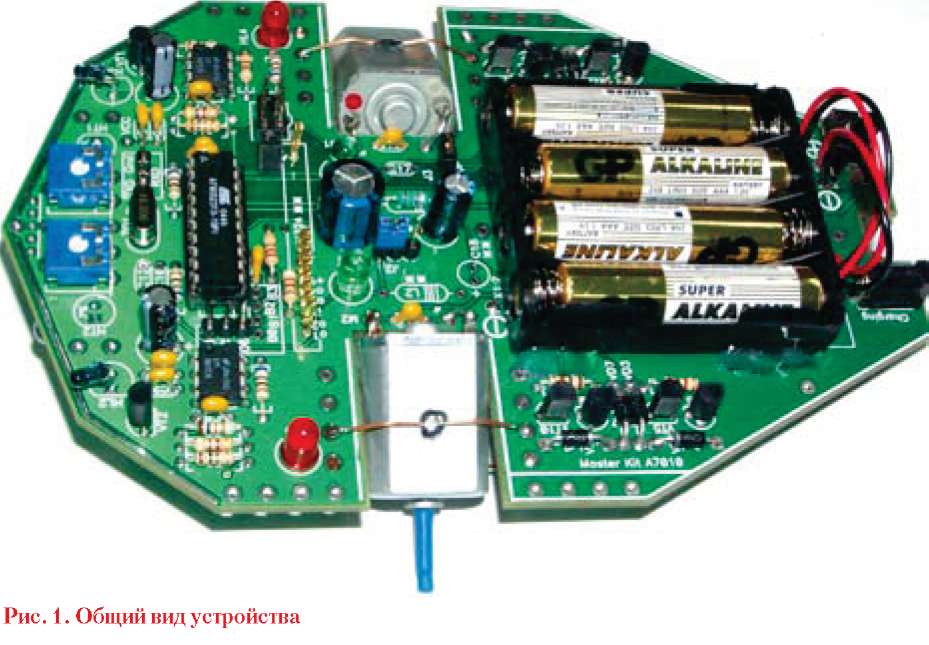
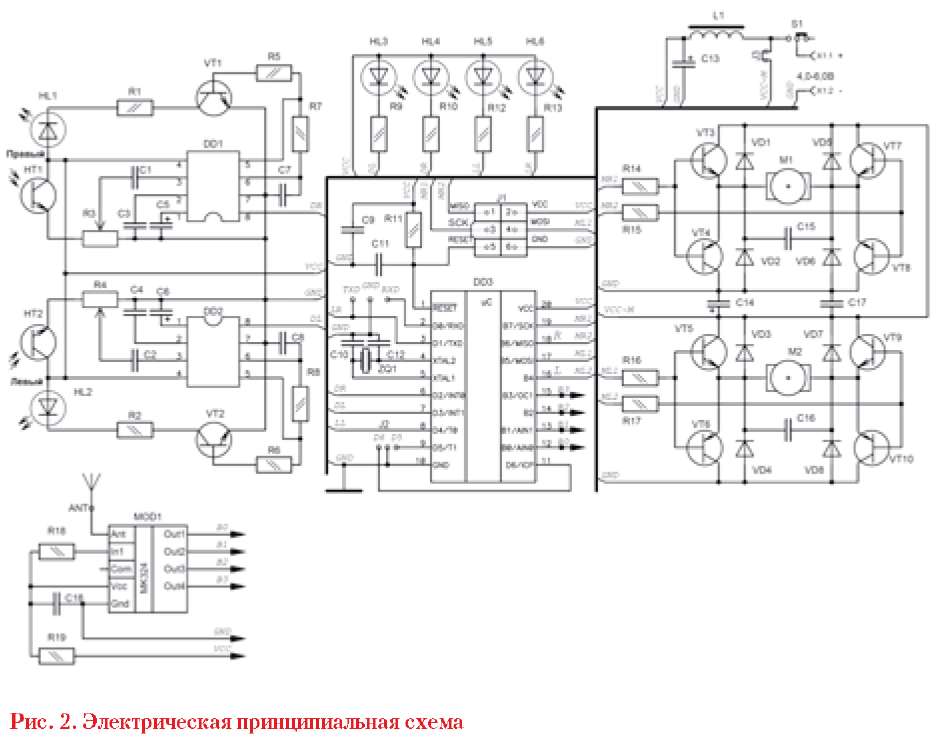
Общий вид устройства представлен на рис. 1, схема электрическая принципиальная - на рис. 2.
Особенностью робота является принцип движения: вместо колес использованы оси двух микроэлектродвигателей постоянного тока, без использования редуктора и колес. Для поддержки устройства в горизонтальном состоянии дополнительно устанавливается небольшое пассивное колесо. Такой механизм накладывает ограничения на поверхность, по которой он будет перемещаться. Линолеум, пластик и ламинированный паркет (а в некоторых случаях и хорошо подогнанный штучный паркет) - самые подходящие покрытия для перемещения робота-жука. Совершенно непроходимой поверхностью является ковролин, асфальт, земля и т.п. Для повышения проходимости и увеличения скорости нужно надеть на валы двигателей трубочки: используйте для этого
изоляцию от толстого провода, также подойдут кембрик или термоусадная трубка соответствующего диаметра. Подбирая колеса от игрушечных машин или случайных пластмассовых изделий, не стоит увеличивать диаметр более 5-7 мм - это заметно увеличит потребляемый ток и сильно изменит поведение робота.
В состав фотосенсоров входят свето-диоды HL1, HL2, фототранзисторы HT1, HT2 и микросхемы DDI, DD2 - в качестве которых используются декодеры тонального сигнала с ФАПЧ - LM567, обладающие очень хорошей чувствительностью и избирательностью.
У этих микросхем есть встроенный генератор, усиленный сигнал которого и подается на ИК светодиод. Отраженный сигнал попадает на фототранзистор и через регулятор чувствительности R3 и R4 на вход микросхемы LM567, а на ее выходе появляется сигнал логического нуля. Каждый канал настроен на свою частоту - так, чтобы отраженный свет левого канала не мешал правому и наоборот. Частоту настройки приема каждого канала определяет зависимость f0=1/(1,1 R C), где элементы R,C, соответственно R7, C7 для правого канала и R8, C8 для левого.
Применение микросхем LM567 позволило заметно разгрузить микроконтроллер. Все обслуживание фотодатчиков происходит аппаратно, а на DD3 приходят готовые сигналы прерывания, запускающие разворот влево или вправо от препятствия.
Конструктивно робот выполнен на одной печатной плате из фольгированно-
го стеклотекстолита. Двигатели так же установлены на плате с помощью проволочных стяжек. Монтажная схема, а также чертежи печатной платы (вид сверху и снизу) приведены на рис. 3, рис. 4 и рис. 5, соответственно.
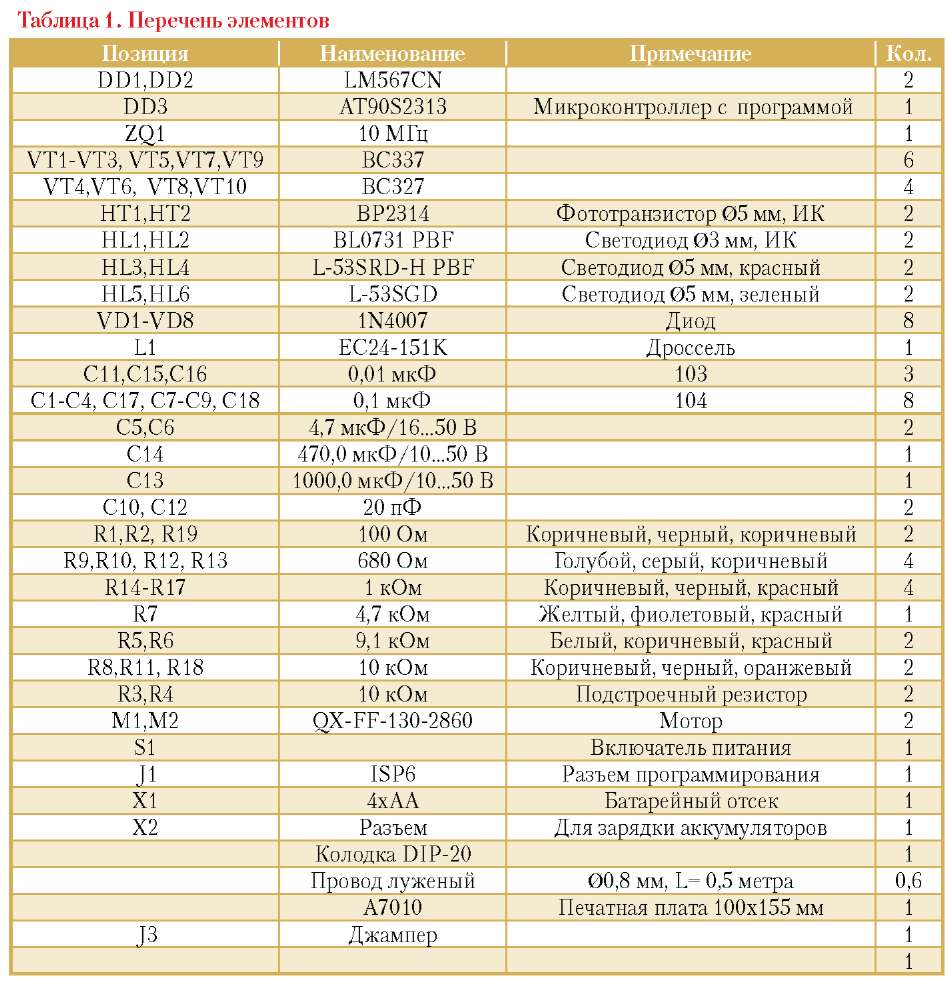
Перечень компонентов для самостоятельной сборки приведен в таблице 1.
порядок сборки
Устанавливают на плату все резисторы, не лишним будет предварительный контроль номиналов тестером (при его наличии) - это позволит избежать грубых ошибок. Установите конденсаторы, затем дроссель L1 и колодку под микросхему DD3, Включатель питания S1 и джампер J3. В зависимости от квалификации и личных предпочтений, паять можно как по отдельности каждый элемент, так и группами по несколько штук.
Приступают к установке полупроводников, на плате в качестве подсказки, изображены профили корпусов транзисторов и светодиодов. Вначале диоды VD1-VD8, затем транзисторы. Установите BC337 -Q1, Q2, Q3, Q5, Q7, Q9, потом BC327 -Q4, Q6, Q8, Q10. Светодиоды HL3, HL4, HL5, HL6. Установите микросхемы DD1, DD2. После установки, настоятельно рекомендуется тщательно проверить правильность монтажа по схеме.
Светодиоды HL1, HL2 и фототранзисторы HT1 HT2 устанавливают на достаточно длинных выводах, допускающих изгиб для выбора направления излучения и приема ИК сигналов, но так, чтобы они
не выступали за торец платы, т.е. заподлицо, иначе во время маневров эти элементы могут задевать предметы и терять настройку. Желательно фототранзисторы установить снизу платы, как показано на рисунке 6, это позволит повысить чувствительность ИК радара и защитит фототранзисторы от засветки внешним светом.
Двигатели крепятся на плате стяжками из луженого провода. Перемычки закрепляются при помощи пайки. Чтобы правильно установить двигатели - цветные метки (ЦМ) возле выводов двигателя, должны быть сориентированы вперед по ходу движения робота. Постарайтесь, что бы углы наклона осей каждого двигателя с платой были одинаковые, если углы будут заметно отличаться, то при движении вперед один из двигателей будет обгонять другой, и движение будет происходить по дуге. До окончания настройки, не закрепляйте двигатели «намертво», возможно придется менять полярность их включения или углы наклона. Устанавливают отсек питания.
В хвостовой части платы имеется вырез для опорного колеса, подберите для него шарик или бусинку диаметром около 9 мм. И закрепите его на оси из толстой проволоки (подойдет обрезок вывода диода). Нельзя применять резиновые шарики и колеса не круглой формы, так как они будут сильно тормозить при разворотах. Если подходящего колеса не нашлось, то можно попытаться спаять опорную «корзинку» из трех толстых проводов.
|

