Схемы питания программируемых логических интегральных схем (плис)
Среди разработчиков электронной аппаратуры все популярнее становится программируемая логика. Но разработка источника питания для таких микросхем имеет ряд особенностей. Специалисты — «цифровики» зачастую не имеют достаточно опыта в этой специфической области.
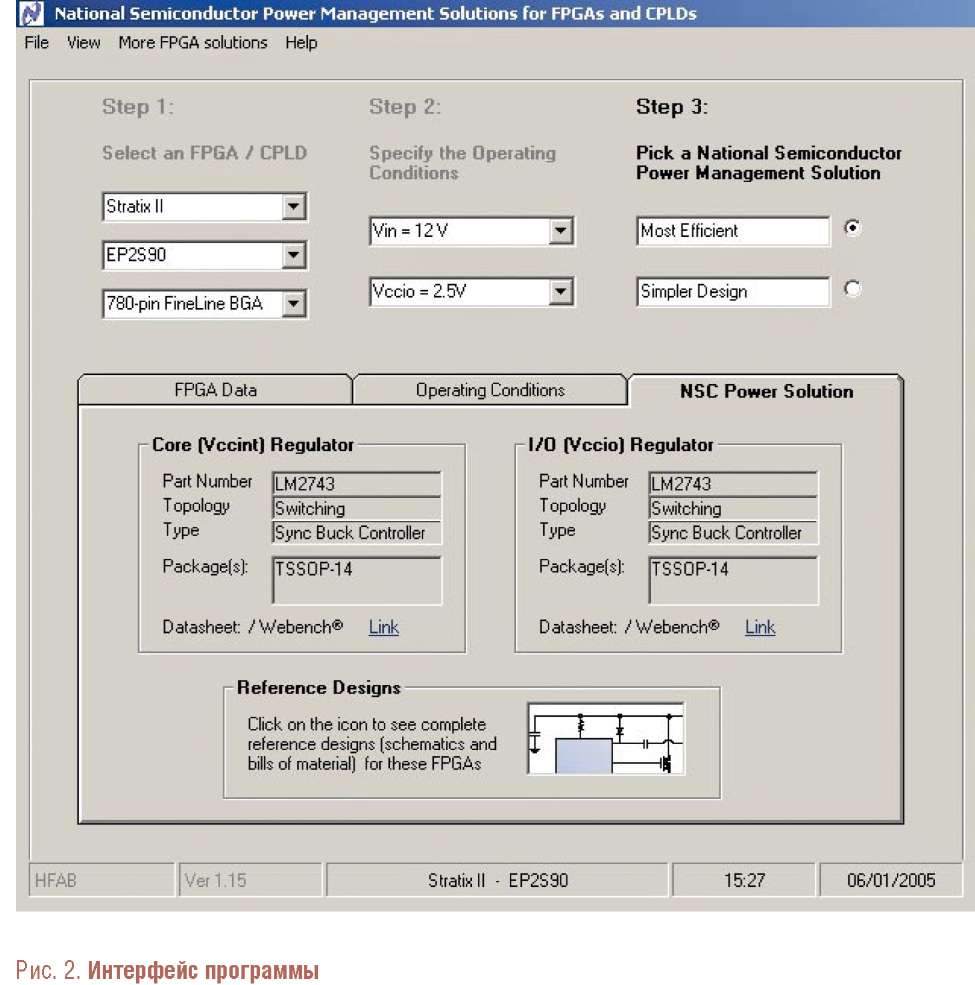
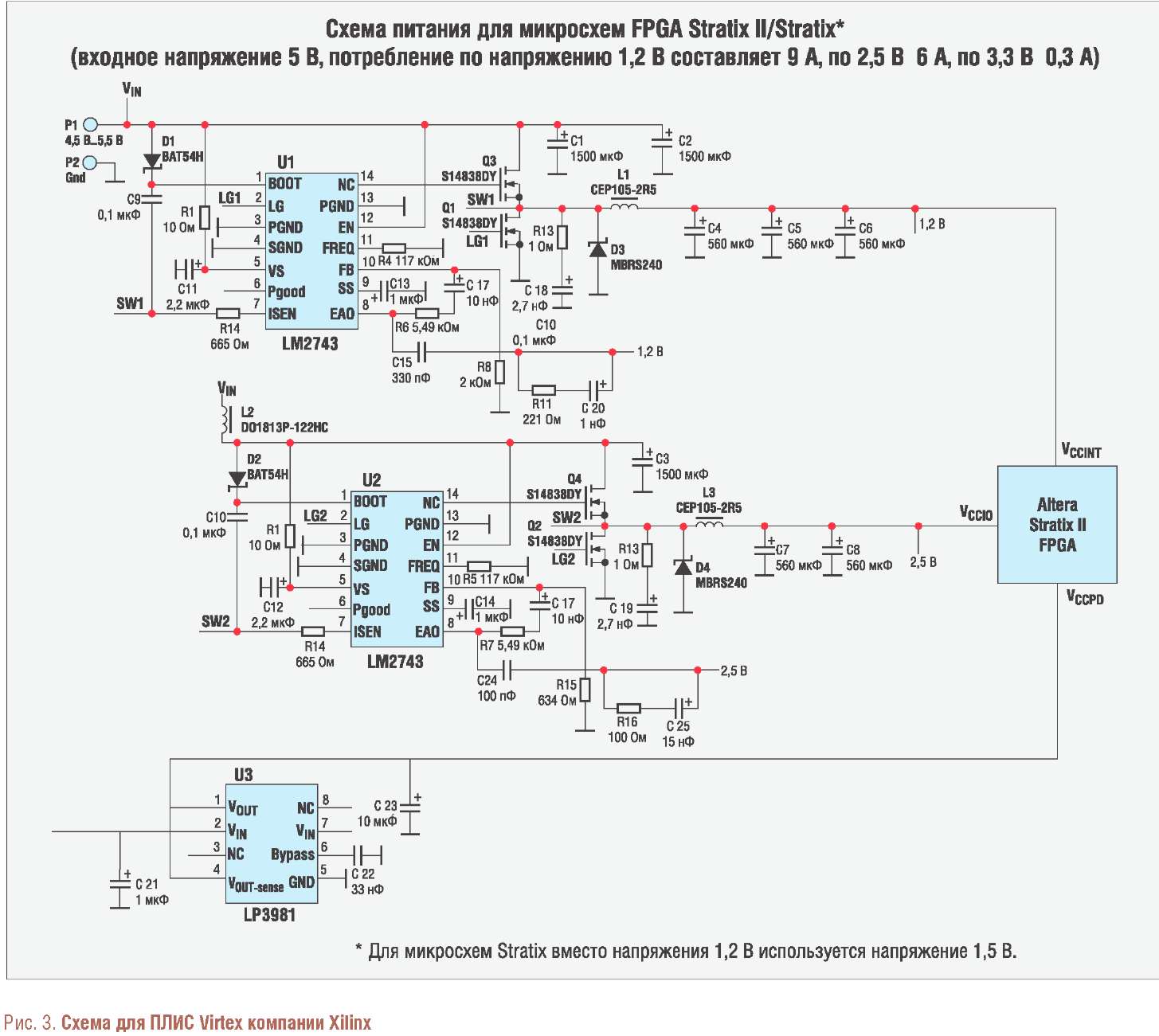
Первым шагом в ликвидации этого пробела в знаниях может стать материал инженеров компании National Semiconductor, в котором рассматриваются этапы работы, их особенности, а также приводятся конкретные примеры и рекомендации со ссылками на сетевые ресурсы. В частности, рассмотрено применение контроллеров питания производства National Semiconductor совместно с ПЛИС Altera и Xilinx, пошагово описаны этапы работы с программным обеспечением National для выбора оптимального контроллера и приведена принципиальная схема питания ПЛИС Virtex компании Xilinx.
Сегодня микросхемы ПЛИС получают все большее распространение благодаря своей гибкости по сравнению с ASIC (заказные интегральные схемы) и благодаря своим постоянно растущим возможностям. Большинство из разработчиков, которые активно используют ПЛИС, уделяют основное внимание разработке цифровой схемы и правильности ее программирования. Такой уклон в сторону цифровых средств разработки объясняет то, что эти разработчики практически не имеют опыта в аналоговой схемотехнике, который просто необходим для создания оптимального источника питания для микросхемы ПЛИС. В этой статье мы рассмотрим некоторые особенности, связанные с питанием
ПЛИС, а также дадим полезные советы, которые помогут при выборе оптимального контроллера питания.
ВЫБОР ТОПОЛОГИИ
Перед тем, как перейти к выбору оптимально подходящей для данного приложения микросхемы, необходимо выбрать топологию схемы питания. Существуют линейные понижающие преобразователи, которые требуют минимального количества внешних компонентов. Однако в большинстве случае подобные линейные стабилизаторы не подходят для питания ПЛИС: они имеют низкий КПД и создают значительные проблемы при организации теплоотвода, так как современные ПЛИС потребляют значительный
ток питания. Таким образом, во многих случаях необходимо использовать импульсные контроллеры питания. Существуют как понижающие, так и повышающие импульсные конверторы, и то, какой именно конвертор следует использовать, определяется значением входного напряжения и тем, какие напряжения необходимо подать для питания микросхемы ПЛИС. В большинстве приложений используются понижающие импульсные преобразователи.
В свою очередь импульсные регуляторы питания можно разделить на две группы: синхронные и асинхронные. Асинхронные преобразователи используют в качестве ключа транзистор и диод. Синхронные преобразователи используют два транзистора, один из которых используется вместо диода — падение напряжения на транзисторе значитель-
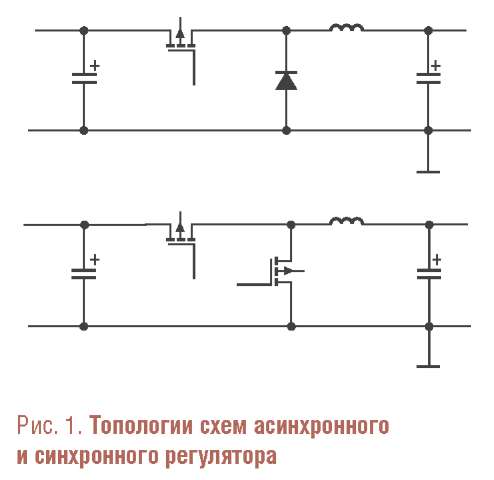
но ниже падения напряжения на диоде. Синхронные регуляторы имеют более сложную конструкцию, однако обеспечивают более высокое значение КПД, так как падение напряжения на транзисторе меньше в сравнении с падением напряжения на диоде.
В тех случаях, когда необходимо добиться высокого КПД при низких значениях выходного напряжения и разница между входным напряжением Vin и выходным напряжением Vout достаточно велика, обычно выбирают синхронные регуляторы. Для других приложений можно использовать асинхронные регуляторы, которые имеют меньшую стоимость и меньшую сложность. На рисунке 1 для сравнения приведены обе этих топологии: вверху показана
асинхронная схема, внизу — синхронная.
ОСОБЕННОСТИ В СХЕМЕ ПИТАНИЯ ПЛИС
Особое внимание необходимо уделить последовательности включения шин питания, которую необходимо обеспечивать при включении или выключении питания некоторых микросхем ПЛИС.
Некоторые микросхемы ПЛИС не предъявляют требований к последовательности включения шин питания, для других это является обязательным. Подобные требования могут различаться для различных микросхем, и здесь не существует какого-то правила, общего для всех производителей.
Обеспечить необходимую последовательность включения
шин питания достаточно просто — одним из возможных вариантов является выбор компонентов с поддержкой функции soft start (мягкий старт). Эта функция позволяет задать время задержки для включения каждой из шин питания, устанавливая таким образом временную последовательность подачи различных напряжений на микросхему. Если подобная функция отсутствует, то можно использовать вывод, сигнализирующий о наличии требуемого уровня напряжения питания, в качестве источника сигнала для включения следующей шины питания. Подобный способ может использоваться только при включении, но не при выключении питания системы.
Другим требованием является монотонность нарастания внутреннего напряжения питания Vccint. Добиться выполнения этого требования можно, выбрав соответствующий контроллер питания, а также используя конденсатор в схеме источника питания.
При рассмотрении максимального значения тока, который потребляет микросхема ПЛИС, необходимо обязательно учитывать, что в начальный момент после подачи питания возникает большой скачок тока потребления. Для того чтобы этот кратковременный скачок не привел к падению напряжения ниже критического порога, необходимо использовать большое количество развязывающих конденсаторов на выходной шине питания. Это позволяет обеспечить краткосрочное потребление тока и благодаря этому нет необходимости проектировать источник питания, ориентируясь на пиковое максимальное значение тока потребления.
Микросхемы ПЛИС могут потреблять в отдельные промежутки времени достаточно большой ток, по этой причине важна правильная топология печатной платы, иначе могут возникать проблемы с функциональностью и электромагнитной совместимостью.
|

