Робот-жук.Продолжение
При наличии тестера во время первого включения целесообразно измерить потребляемый ток. Чтобы не повредить тестер, установите на нем предел измерения тока 10 А, щупы для измерения удобно подключить к крайним выводам включателя S1 (81-выключен). При правильно собранной схеме ток не должен превышать 100 мА, если это не так, немедленно отключите питание. При отсутствии тестера подайте напряжение питания, и, касаясь пальцем транзисторов и диодов, убедитесь, что они не разогреваются.
Внимание! Ошибочно включенные транзисторы и диоды, пропуская через себя большой ток, могут разогреться до температуры выше 100°С.
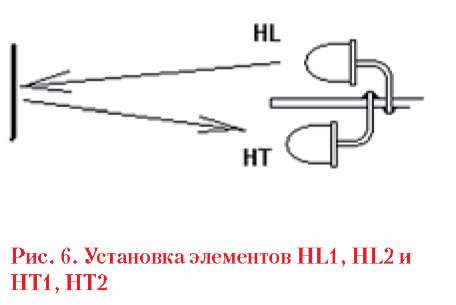
Настраивают чувствительность фотосенсоров, для этого регулируют резисторами R3 и R4 каждый канал так, чтобы робот уверенно обнаруживал предметы на расстоянии 10-15 см. О срабатывании

фотосенсоров можно судить по зажиганию светодиодов HL3, HL4.
Далее проверяют работоспособность мостовых схем управления двигателями. Все манипуляции должны сопровождаться отключением питания. Для проверки правого канала устанавливают две перемычки в колодке DD3 (микроконтроллер не установлен) между выводами 19(MR1)-10(GND) и 18(MR2)-20(VCC), в этом случае базы VT3, VT4 оказываются подключенными к общему проводу через резистор R14, а на базы VT7, VT8 через R15 подается напряжение питания. При этом двигатель М1 должен вращаться вперед, а весь робот будет крутиться на месте, двигаясь против часовой стрелки. Чтобы изменить направление движения устанавливают перемычки так: 19-20 и 18-10. Аналогичным образом проверяют работу левого канала, подключая на колодке выводы 17(ML1) 16(ML2) попеременно к выводам 10(GND) и 20(VCC). Для движения вперед: 17-10 и 16-20, а для обратного движения 17-20 и 16-10, соответственно. При этих испытаниях можно
пользоваться только тонким проводом, что бы не повредить колодку DD3.
Теперь можно установить DD3 и провести окончательные испытания робота в движении. Возможно, придется подстроить чувствительность фото-сенсоров резисторами R3 и R4.
подключение модуля радиоуправления
При желании робот можно оснастить пультом дистанционного управления.
МАСТЕР КИТ производит готовые модули радиоуправления МК324, работающие на частоте 433 МГц, в состав которых входит четырехкнопочный брелок управления и приемник команд. Для подключения этого модуля (MOD1) на плате робота имеется посадочное место, необходимо только установить элементы R18, R19, C18, предназначенные для нормальной работы приемника радиоуправления.
Переключение между автоматической работой и радиоуправлением осуществляется одновременным нажатием кнопок 1 и 4 на брелке радиоуправления.
На плате предусмотрены места для установки разъема программирования и плат расширения функциональных возможностей.
Для тех, кто решит самостоятельно написать программное обеспечение для этого робота, «МАСТЕР КИТ» выпускает набор NM9211 - программатор микроконтроллеров серии AT89S/AT90S фирмы ATMEL. Микроконтроллер
AT90S2313 или ATtiny2313, для экспериментов с программой управления роботом, можно приобрести в любом магазине радиодеталей.
заключение
Чтобы сэкономить время и избавить вас от рутинной работы по поиску необходимых компонентов и изготовлению печатных плат, МАСТЕР КИТ предлагает набор «Робот-жук» NM7010. Набор состоит из заводской печатной платы, микроконтроллера с программой, всех необходимых компонентов и инструкции по сборке и эксплуатации.
Более подробно ознакомиться с ассортиментом нашей продукции можно с помощью CD-КАТАЛОГА «МАСТЕР КИТ-2006», выпуск 1 и на сайте www.masterkit.ru, где представлено много полезной информации по электронным наборам и модулям МАСТЕР КИТ, приведены адреса магазинов, где их можно купить.
На сайте работает конференция и электронная подписка на рассылку новостей. В разделе «КИТы в журналах» предложены радиотехнические статьи для специалистов и радиолюбителей.
Наш ассортимент постоянно расширяется и дополняется новинками, созданными с использованием новейших достижений современной электроники.
Наборы МАСТЕР КИТ можно купить в магазинах радиодеталей Вашего города.
|

