Робот - жук
Пропонований набір NM7010 МАЙСТЕР КИТ дозволить радіоаматорові зібрати цікавого робота, який своєю поведінкою і зовнішнім виглядом чимось нагадує жука: це справжній робот, обладнаний двома інфрачервоними фотоелектричними сенсорами, що виявляють перешкоди; електромоторами з мостовими схемами управління і світлодіодною індикацією. Управляє роботом мікроконтролер AT90S2313 з необхідним для нормальної роботи програмним забезпеченням.
Набір, безумовно, буде цікавий і корисний для знайомства з основами робототехніки та отримання досвіду збірки і настройки мікропроцесорних пристроїв, а також початківцям програмістам, для знайомства з основами програмування мікроконтролерів.
На платі передбачено місце для установки модуля радіоуправління МК324, що дозволяє при бажанні керувати роботом вручну по радіоканалу на частоті 433 МГц.
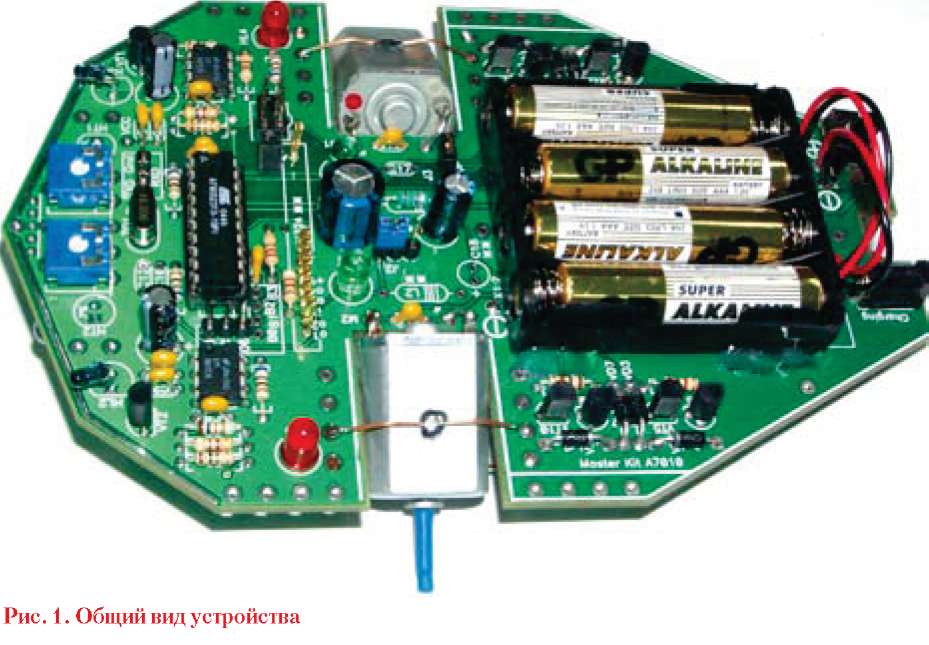
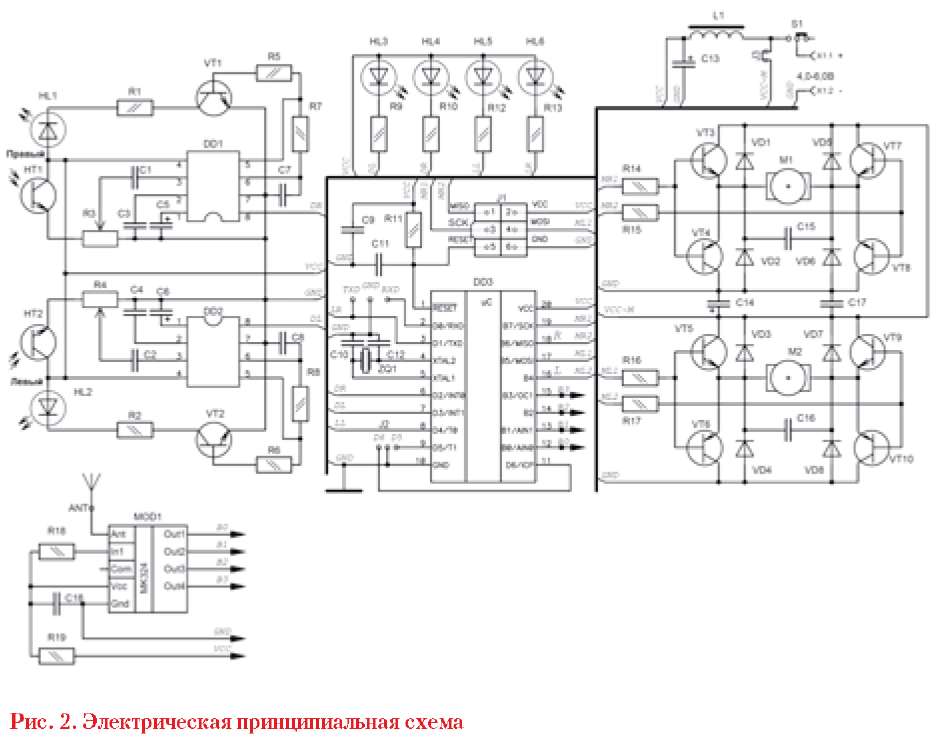
Загальний вигляд пристрою представлений на рис. 1, схема електрична принципова - на мал. 2.
Особливістю робота є принцип руху: замість коліс використані осі двох мікроелектродвигунів постійного струму, без використання редуктора і коліс. Для підтримки пристрою в горизонтальному стані додатково встановлюється невелике пасивне колесо. Такий механізм може запобігти поверхню, по якій він буде переміщатися. Лінолеум, пластик і ламінований паркет (а в деяких випадках і добре підігнаний штучний паркет) - самі відповідні покриття для переміщення робота-жука. Абсолютно непрохідною поверхнею є ковролін, асфальт, земля і т.п. Для підвищення прохідності і збільшення швидкості потрібно надіти на вали двигунів трубочки: використовуйте для цього ізоляцію від товстого дроту, також підійдуть кембрік або термоусадная трубка відповідного діаметру. Підбираючи колеса від іграшкових машин або випадкових пластмасових виробів, не варто збільшувати діаметр більше 5-7 мм - це помітно збільшить струм і сильно змінить поведінку робота.
До складу фотосенсорів входять світло-діоди HL1, HL2, фототранзистори HT1, HT2 і мікросхеми DDI, DD2 - в якості яких використовуються декодери тонального сигналу з ФАПЧ - LM567, що володіють дуже хорошою чутливістю і вибірковістю.
У цих мікросхем є вбудований генератор, посилений сигнал якого і подається на ІК світлодіод. Відбитий сигнал потрапляє на фототранзистор і через регулятор чутливості R3 і R4 на вхід мікросхеми LM567, а на її виході з'являється сигнал логічного нуля. Кожен канал налаштований на свою частоту - так, щоб відбите світло лівого каналу не заважав правому і навпаки. Частоту налаштування прийому кожного каналу визначає залежність f0 = 1 / (1,1 R C), де елементи R, C, відповідно R7, C7 для правого каналу і R8, C8 для лівого.
Застосування мікросхем LM567 дозволило помітно розвантажити мікроконтролер. Всі обслуговування фотодатчиків відбувається апаратно, а на DD3 приходять готові сигнали переривання, що запускають розворот вліво або вправо від перешкоди.
Конструктивно робот виконаний на одній друкованій платі з фольгірованно-
го склотекстоліти. Двигуни так само встановлені на платі за допомогою дротяних стяжок. Монтажна схема, а також креслення друкованої плати (вид зверху і знизу) наведені на мал. 3, мал. 4 і мал. 5, відповідно.
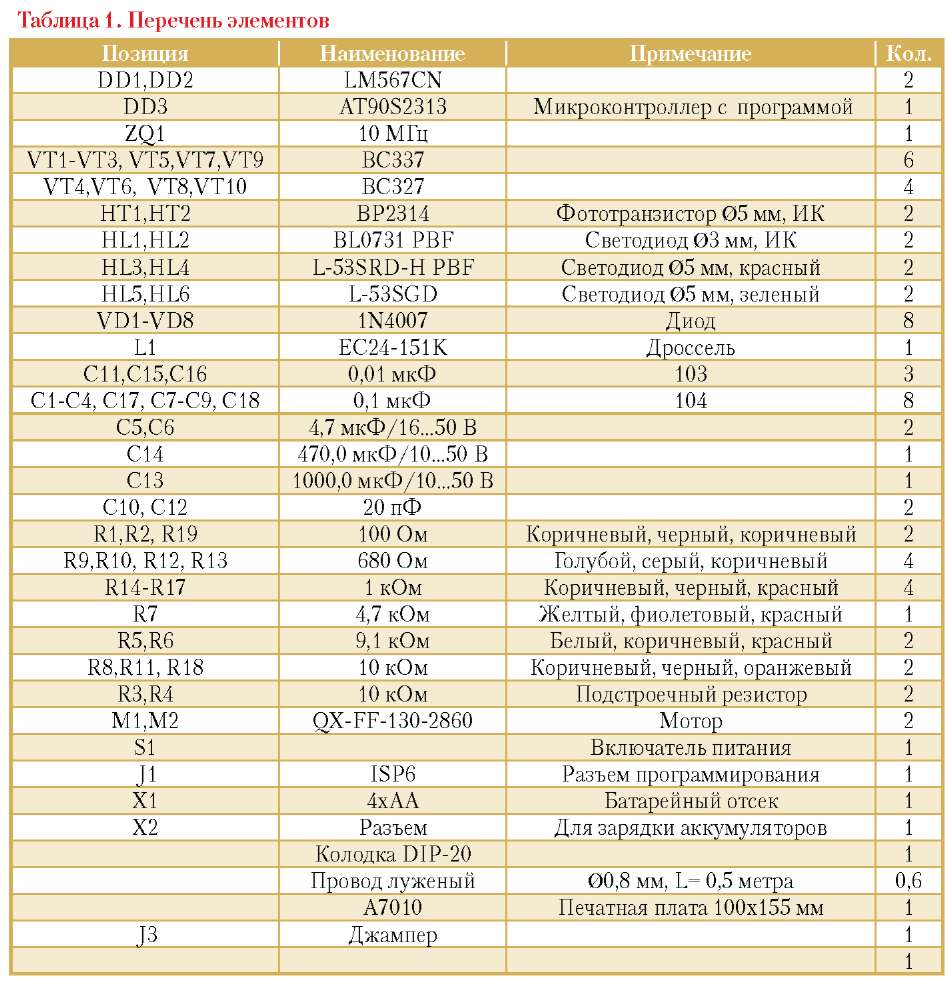
Перелік компонентів для самостійної збірки наведено в таблиці 1.
порядок складання
Встановлюють на плату все резистори, не зайвим буде попередній контроль номіналів тестером (при його наявності) - це дозволить уникнути грубих помилок. Встановіть конденсатори, потім дросель L1 і колодку під мікросхему DD3, Вмикач харчування S1 і джампер J3. Залежно від кваліфікації та особистих уподобань, паяти можна як окремо кожен елемент, так і групами по кілька штук.
Приступають до установки напівпровідників, на платі в якості підказки, зображені профілі корпусів транзисторів і світлодіодів. Спочатку діоди VD1-VD8, потім транзистори. Встановіть BC337 -Q1, Q2, Q3, Q5, Q7, Q9, потім BC327 -Q4, Q6, Q8, Q10. Світлодіоди HL3, HL4, HL5, HL6. Встановіть мікросхеми DD1, DD2. Після установки, настійно рекомендується ретельно перевірити правильність монтажу за схемою.
Світлодіоди HL1, HL2 і фототранзистори HT1 HT2 встановлюють на досить довгих висновках, що допускають вигин для вибору напрямку випромінювання і прийому ІК сигналів, але так, щоб вони не виступали за торець плати, тобто урівень, інакше під час маневрів ці елементи можуть зачіпати предмети і втрачати настройку. Бажано фототранзистори встановити знизу плати, як показано на малюнку 6, це дозволить підвищити чутливість ІК радара і захистить фототранзистори від засвічення зовнішнім світлом.
Двигуни кріпляться на платі стяжками з лудженої дроти. Перемички закріплюються за допомогою пайки. Щоб правильно встановити двигуни - кольорові мітки (ЦМ) біля висновків двигуна, повинні бути зорієнтовані вперед по ходу руху робота. Постарайтеся, що б кути нахилу осей кожного двигуна з платою були однакові, якщо кути будуть помітно відрізнятися, то при русі вперед один з двигунів буде обганяти інший, і рух буде відбуватися по дузі. До закінчення налаштування, не закріплюйте двигуни «намертво», можливо доведеться міняти полярність їх включення або кути нахилу. Встановлюють відсік харчування.
У хвостовій частині плати є виріз для опорного колеса, підберіть для нього кульку або намистинку діаметром близько 9 мм. І закріпіть його на осі з товстого дроту (підійде обрізок виведення діода). Не можна застосовувати гумові кульки і колеса не круглої форми, так як вони будуть сильно гальмувати при розворотах. Якщо відповідного колеса не знайшлося, то можна спробувати спаяти опорну «кошик» з трьох товстих дротів.
|

